Throttle Quadrant Rebuild - Parking Brake Mechanism Replacement, Improvement, and Operation
/Parking brake lever in the UP engaged position. The red incandescent bulb is 28 volts, however, a 12 volt bulb can be used. Throttle is Boeing OEM
As part of the throttle quadrant rebuild, the parking brake system was enhanced. In the previous system, the parking brake lever was controlled by a relay and a 12 volt solenoid. The system worked well, however, there were some minor differences between the simulated system and that of the system used in the real Boeing aircraft.
Furthermore, as it was predominately a software system, any change to the avionics suite would affect its operation.
To understand more fully the mechanical linkages used, please read the article regarding the previous system 737 Parking Brake Mechanism.
Revamped System
There has been minimal alteration to the mechanical system, with the exception that the solenoid has been replaced by a 12 volt actuator, a micro-switch has replaced the toggle switch, and the system now requires the toe brakes to be depressed to engage the parking brake.
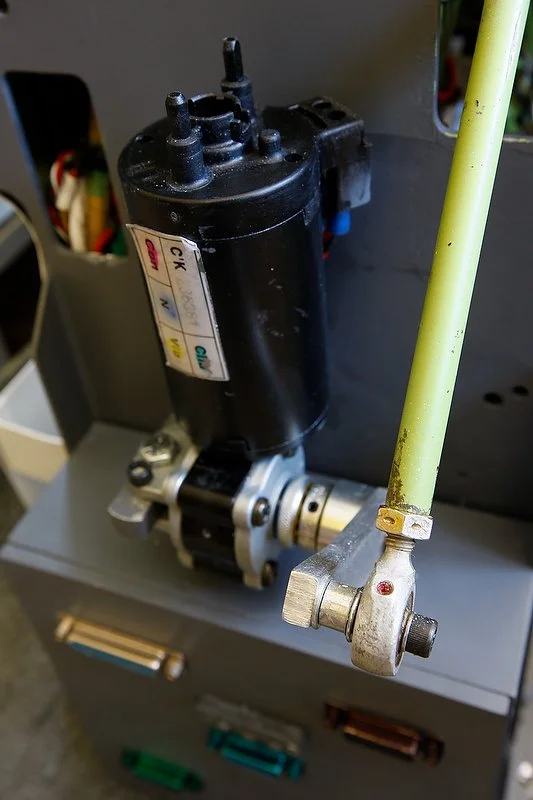
The actuator is partially visible; the blue coloured mechanism. The parking brake vertical control rod, micro limit switch and upper part of the high tensile spring can be to seen to the lower right
What is an Actuator
An actuator is a type of motor that is responsible for moving or controlling a mechanism or system. It is operated by a source of energy, typically electric current, hydraulic fluid pressure, or pneumatic pressure, and converts that energy into motion.
Almost every modern automobile has a door lock actuator which is responsible for the locking and unlocking of the door locks. This website 'How Stuff Works' provides a very good overview of how an actuator works.
The actuator is responsible for maintaining the parking brake lever in the UP position. This occurs when the circuit is closed and 12 volt power is briefly directed to the actuator to lock the device into the engaged position.
The actuator used is an automotive door lock actuator - code BOLA-2 by Bullz-Audio (amazon link).
closer view of the mounted acctuator
System Overview
The actuator is the mechanism that enables the parking brake lever to be locked into the UP position. Without power, the actuator is in the resting position and the parking brake lever is pulled to the DOWN position by a high tensile spring.
The annunciator is mounted horizontally on the Captain-side of the throttle quadrant and is powered by 12 volts.
To connect the actuator to the parking brake system, the following items have been used:
An actuator;
A micro-limit switch;
A relay;
A 12 volt power supply and busbar;
A standard interface card (Leo Bodnar BU0836A Joystick Controller card); and,
Depending upon your requirements (mechanical or part mechanical system), a Phidget 0/0/8 card (1017_1).
Registration of Parking Brake Movement
After the parking brake lever has been wired to the BU0836A card, it must be registered in Windows. After this has been completed, the parking brake lever can be assigned in ProSim737, P3D, or FSUIPC.
Micro-Switch and Relay
Two items are used to control whether power enters the circuit: a micro-switch and a double throw relay.
A micro-switch is used to open or close the circuit when the parking brake lever is raised or lowered.
The micro-switch has been mounted proximal to the vertical control rod, and when the parking brake is is in the DOWN position, the connectors from the micro switch are touching a flange that has been attached to the rod, however, when the parking brake lever is moved to the UP position, the connection is severed (circuit open or closed).
The relay is connected to the toe brakes, and when the brakes are depressed, the relay will close. Conversely, when the brakes are released the relay will open. The connection of the relay to the toe brakes can be done a number of ways, but probably the easiest way is to install a button or micro-switch to the toe brakes.
The mechanism, to function correctly, requires that the micro-switch be closed and the parking brake lever be in the raised position. The micro-switch will receive power only when the relay is closed (toe brakes depressed) and the micro-switch is closed (parking lever raised).
In short, the relay (open/closed) is triggered by the movement of the toe brakes and the relay, either enables or inhibits 12 volt power to flow into the circuit, and this is dependent upon the whether the toe brakes are depressed.
The reason for this set-up will be understood shortly.
Toe Brakes
In the real aircraft, the parking brakes can only be engaged or disengaged when the Captain-side or First Officer-side toe brakes are depressed. This mechanical system has been faithfully replicated by using a relay, micro-switch and actuator.
How It Works
The actuator will only engage when the toe brakes are depressed. This means that the parking brake cannot be engaged (lever locked in the UP position with red annunciator on) or disengaged (lever in DOWN position with red annunciator off) unless the toe brakes are depressed.
Depressing or releasing the toe brakes closes or opens the relay which in turn enables 12 volt power to reach the annunciator via the busbar. However, the system is only 'live' (closed system) when the parking brake lever is moved to the UP position, enabling power to flow unhindered through the circuit. When the toe brakes are released, the circuit is open and the actuator remains in the engaged locked position with the parking brake lever locked in the UP position.
To release the parking brake lever, the opposite occurs. When the toe brakes are depressed, the relay opens directing power to the actuator which disengaged the actuator lock. The parking brake lever is then pulled to the DOWN position by the tensile spring.
How To Engage The Parking Brake
The method used to engage the parking brake is as follows:
Slightly depress the toe brakes. This will open the relay and enable 12 volts to engage the actuator;
Raise the parking brake lever to the UP position and hold it in this position; and,
Release the toe brakes. Releasing pressure on the toe brakes causes the actuator to lock into the engaged position, as the power ceases to flow to the actuator.
To release the parking brake, the toe brakes are depressed. This will cause the actuator to unlock and return to its resting position. The high tensile spring will pull the parking brake lever to the DOWN position with a loud snapping sound.
More Ways To Skin A Cat - Full Mechanical or Part-Mechanical
There are several methods that can be used to connect the actuator to the parking brake mechanism. No one method is better than the other. I have outlined two methods. A Phidget 0/0/8 card can also be used, but this method is slightly more convoluted.
(1) Mechanical Method: This has been described above and requires minimal software.
The toe brakes have a micro-switch that connects to a relay, busbar/12 volts power source and the actuator.
The parking brake lever needs to be wired directly to an interface card, registered in Windows, and the l;ever assigned in ProSim-AR, FSX, or FSUIPC.
(2) Part-mechanical/Software Controlled: This involves using the USER section in the configuration menu within ProSim-AR.
A Phidgets 0/0/8 relay card is connected to ProSim-AR and the the USER interface section in the ProSim737 is used to register the movement of the toe brakes. Using a Phidget card removes the need to install a micro-switch or button to the toe brakes.
The USER interface section can be found in the ProSim737 configuration menu. As an example, USER 1 will be used. Each USER IN has a corresponding USER OUT and this is located in GATES. Opening Configuration/Gates, the same USER number is found (USER 1). In the tab beside USER 1 the output from the Phidgets 0/0/8 card is entered. Therefore, whenever USER 1 is triggered, there will be a corresponding output from the Phidget card.
When the toe brakes are depressed, the software will read the movement and send a signal to the Phidget card to engage the relay. This in turn will enable the busbar to be powered and the micro-switch to receive power. Whether the parking brake lever is engaged (UP) or disengaged (DOWN) will open or close the relay controlling the micro-switch (closing or opening the circuit).
The actuator will be engaged (circuit closed) only if the micro-switch (located on the vertical rod mentioned earlier) connection is severed (parking brake lever is in the raised position closing the circuit).
Actuator Power and Caution LED
The 12 volt actuator is connected to the 12 volt busbar in the Throttle Communication Module (TCM) and then, via a straight-through cable, to the Throttle Interface Module (TIM). The relay for the parking brake mechanism is located in the TIM.
The design of an actuator is such, that it will burn out if continuous power is applied to the mechanism for an extended time. However, if the parking brake is used correctly, the actuator will only receive power for a short period of time when the toe brakes are depressed and the parking brake lever is raised at the same time.
To combat against the unforeseen event of power being continuously supplied to the actuator, for example by a relay that is stuck in the open (on) position, a coloured LED has been fitted to the front of the Throttle Communication Module (TCM). This flashing purple coloured LED illuminates only when the circuit is closed and the actuator is receiving 12 volt power. If the LED is always on it indicates a problem in the system.
Important Point:
Two terms often confused are open circuit and closed in relation to an electrical circuit.
Any circuit which is not complete is considered an open circuit. Conversely, a circuit is considered to be a closed circuit when electricity flows from an energy source to the desired endpoint of the circuit.
Conversely, a closed relay means it allows voltage to travel through it, while an open relay is the opposite.
Additional Information
Like many things, there are several ways to accomplish the same or a similar task. The following posts located in the ProSim737 forum discuss the conversion of the parking brake lever.
This article is one of several that explain the conversion of the OEM Throttle Quadrant.
NOTE: Since publication, ProSim-AR has incorporated into their software a parking brake release 'command'. This by-passes the need to use the USER OUT settings mentioned above. The command is set to the output on the Phidget 0/0/8 card. The parking brake release can be found in the Configuration/Gates menu. (MORE TO COME - under construction).
Updated 04 January 2025